What are you Looking for?
What are you Looking for?
TUC NT in DEDICAT6G
The Professorship Telecommunications Engineering (NT) at the University of Technology Chemnitz (TUC) has a long standing track record in research into connected autonomous driving and reliable communication for future mobility. In the DEDICAT6G project, TUC serves as a technology provider and use case story owner (i.e. radio coverage and knowledge distribution in shared traffic spaces).
The work centers around the theme of “distributed situation knowledge in shared traffic spaces”: This means we are looking at how to efficiently distribute situational awareness and knowledge through the exchange of (processed and/or raw) sensor information between vehicles, RSUs (Road Side Units) and VRUs (Vulnerable Road Users) to increase road safety and improve traffic flow in shared traffic spaces (i.e. spaces where cars, cyclists, pedestrians, and in future delivery bots, and other autonomous vehicles coexist). In shared traffic spaces, VRUs are recognized through the vehicle’s installed sensors (camera, LiDAR, etc.), the camera sensors are mounted on the RSU and the pedestrian’s smart device app, and this information is shared with the vehicle and the RSU, which act as a Mobile Access Point (MAP). Then, the Local Dynamic Map (LDM) is defined based on the shared information. While analysing the VRU’s movement and trajectory in real time on the LDM, it is possible to predict dangerous situations in shared traffic spaces and display warning messages on the vehicle’s screen and the VRUs’ app in real time to increase road safety. At the same time, we use cars and the RSU as Mobile Access Points that can dynamically (i.e. demand driven) extend cellular coverage.
TUC NT uses the CARAI platforms (connected vehicles) as well as an RSU for the trials and tests. The RSU has been extended to sense and process environment data and derive situational knowledge from the sensor data (see the figure below).
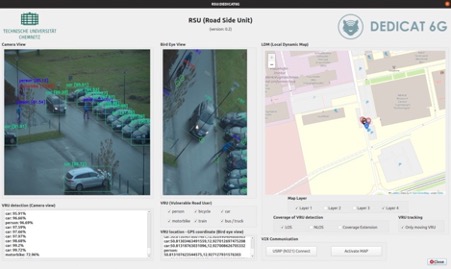
All information from the actors (vehicles and RSU) is then collected and used in a local dynamic map (LDM) that describes the situation in a given area. The information contained in the LDM, together with the derived user and estimated connection numbers helps then to manage the use of the MAPs in vehicles (or the RSU) to dynamically extend the coverage area of the mobile network, if demand for more capacity, or for coverage in a (non-covered) adjacent area is required.
The work in DEDICA6G helps us to further develop and improve our CARAI and RSU platforms, furthermore, the work on distributed intelligence (both on enhanced situation awareness, as well as on resource management for the coverage extension) has extended our research portfolio and therefore our attractiveness as a research partner for industry.